运动学——移动的机理
通常的方法——轮子,履带或腿
考虑的因素——地形、机械复杂性和控制的复杂性

轮子:差速驱动
特点:
两个驱动轮
一个或两个万向轮,用于平衡
优点:
机构简单
能在一个地方转弯
只要两个马达
缺点:
粗糙的地面遇到的困难:
--使用两个万向轮时潜在牵引损失
--使用一个万向轮时容易倾翻
速度和方向有关
轮子——同步驱动
特点:
所有的轮子都是驱动轮
所有的轮子都可以操纵
优点:
通过旋转轮子来转向
四个或更多的轮子可以更好适应粗糙路面
缺点:
机械结构复杂
每一个轮子都可以操纵,并提供动力。
控制复杂:
--很多马达需要控制
--哪里是前面?
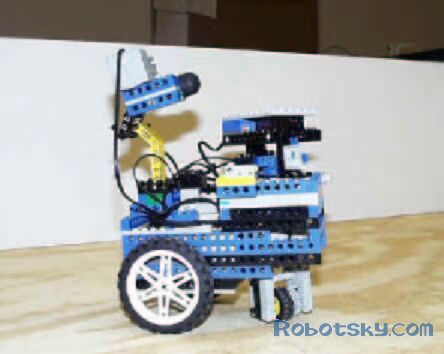
轮子驱动——三轮车
特点:
只有一个马达作为动力(在前轮或通过后面的差分轮)
一个马达在前面作为方向盘
优点:
容易控制
--驾驶和速度不在一起控制
--只需要两个马达
缺点:
不能在原地转动
在不平的路面上容易倾翻
机械结构有点复杂
--需要后面有差速器来避免打滑
--在前轮安装驱动论和做方向盘的马达

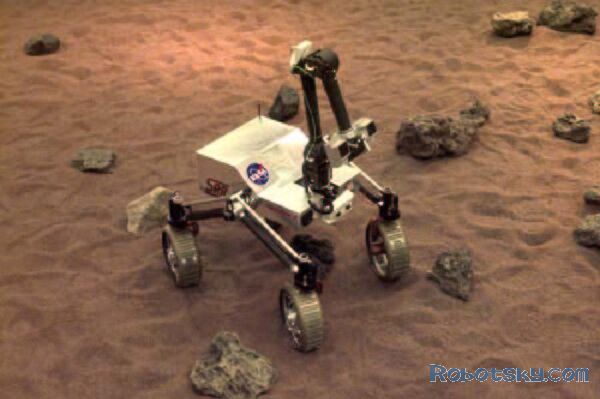
轮子——汽车结构
特点:
一个马达作为动力,通过后面的差速器驱动
一个马达转动前面的两个轮子来改变方向
优点:
在不平的路面上性能较好
容易控制
--驾驶和速度不在一起控制
--只需要两个马达
缺点:
不能在原地转动
机械结构有点复杂
--需要后面有差速器来避免打滑
--需要等量操纵两个前轮

履带
特点:
单独驱动两个履带
优点:
可以在原地转动
在不平的路面上性能非常好
-稳定
-很难到达高的地方
-牵引很好
一个或两个马达
缺点:
只能慢慢转动
速度和方向不能单独控制
摩擦力很大、能量损耗大
机械结构复杂
-能以保持履带拉紧
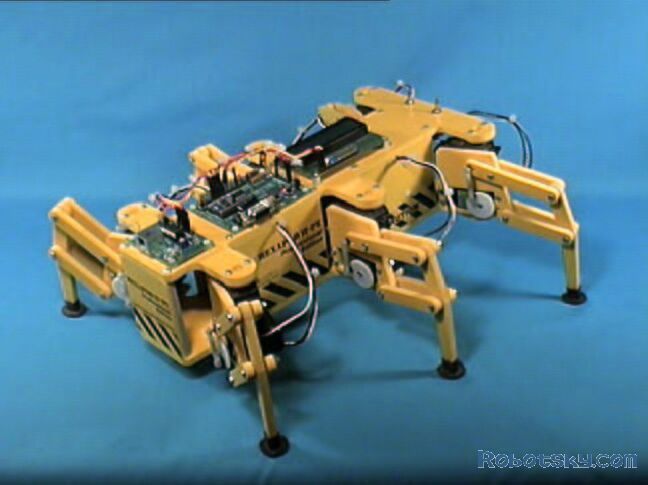
行走
特点:
多只脚协调动作
优点:
在粗糙路面性能较好
-好的关节
-稳定
-好的牵引力
缺点:
不能原地转动
速度慢
控制复杂
-移动困难,操纵性差
机械复杂
每一只脚需要提起和前/后移动
每一只脚可能需要多个马达
这里使用图片以及简单的文字介绍的机器人运动学,在下一次,我们将配合简单的公式,进一步介绍这方面的内容,请继续关注,也很希望你能提供相关资料。


